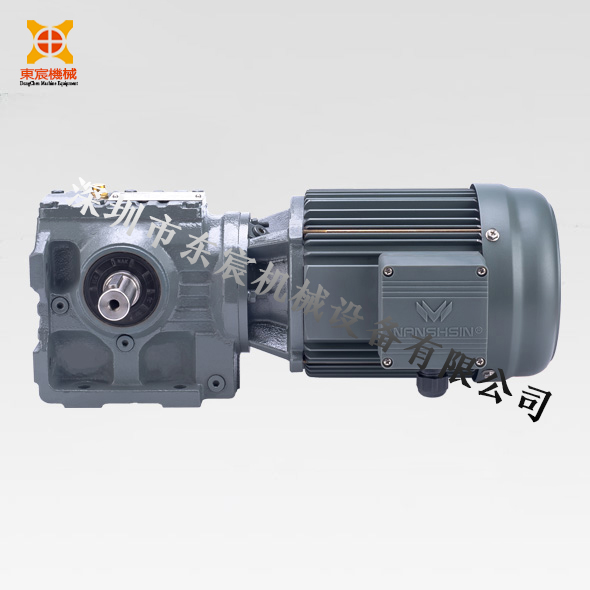
S系列齒輪減速機(jī)
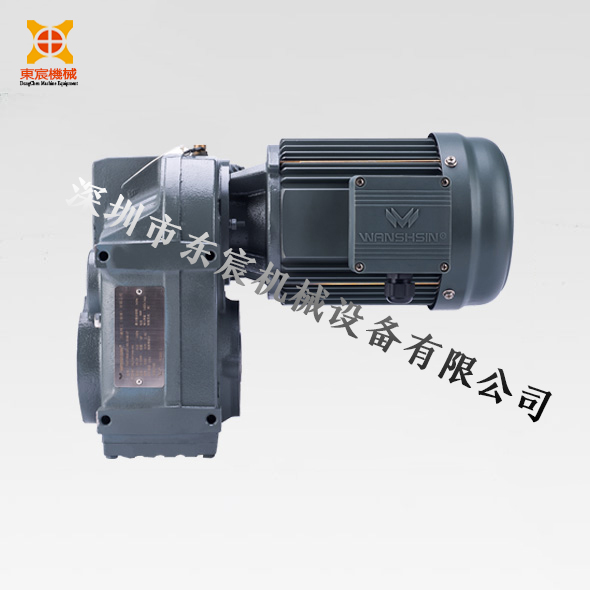
F系列平行軸斜齒輪減速機(jī)
R系列斜齒輪減速機(jī)
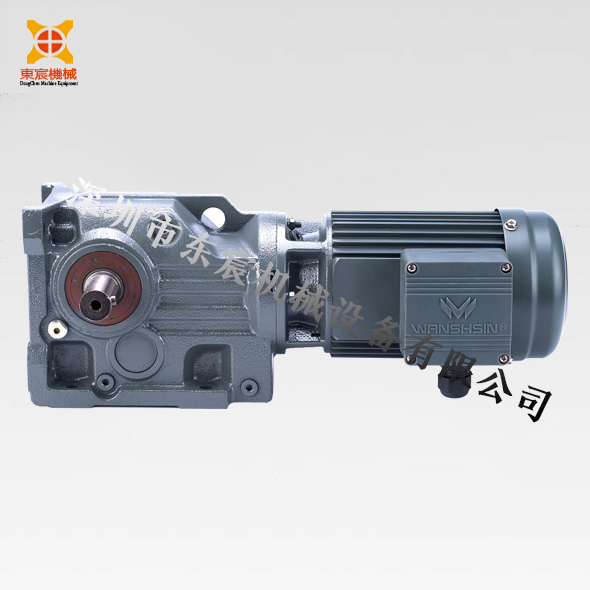
K系列傘齒輪減速機(jī)
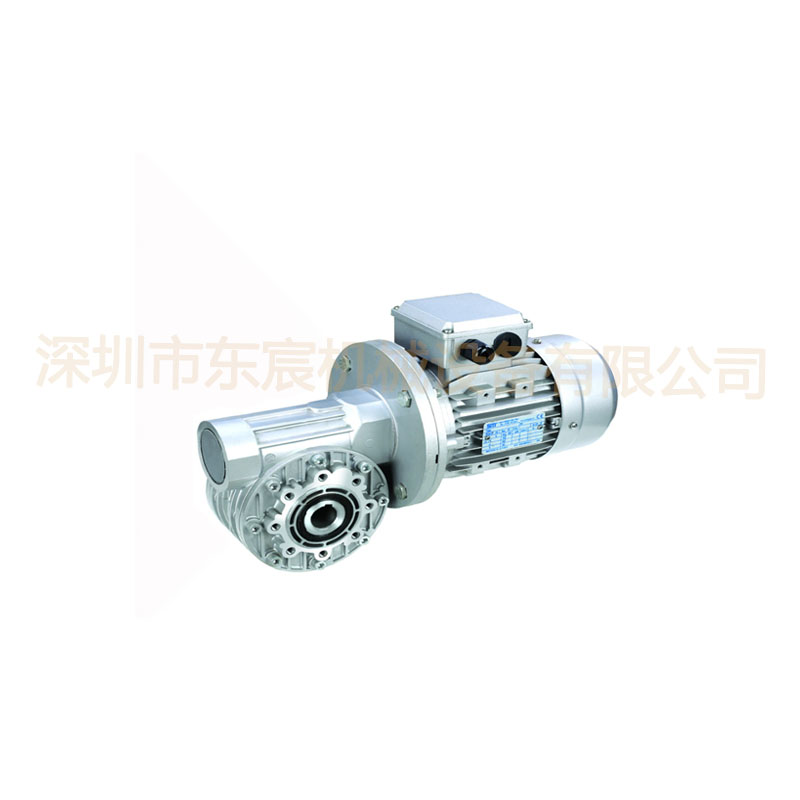
DLS蝸輪蝸桿減速電機(jī)
意大利SITI減速機(jī)MI-I系列
微信公眾平臺
客服微信
首頁
電話
咨詢
地圖